
Description:
KY-032 Obstacle Avoidance Sensor Module. This Avoidance Sensor returns a signal when it detects an object in range.
The range of the sensor is around 2-40 cm is distance. And, It operates at 3.5 to 5 volts at around 20 milliamps.
The Obstacle Avoidance Sensors usually come in two types. It is with 3 and 4 pins.
The 3 pin version does not have the ability to be enabled and disabled. The 4 pin version has an optional Enable pin.
An infrared obstacle avoidance sensor is designed to detect obstacles. Or it is for the difference in reflective services.
One application is to help a wheeled robot avoid obstacles with a sensor to react to adjustable distance settings.
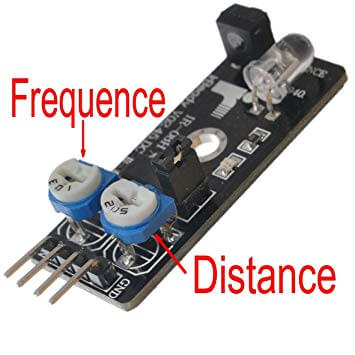
This device has an infrared transmitter and receiver and that forms the sensor pair.
The transmitter LED emits a certain frequency of infrared that which the receiver LED will detect.
The receiving LED will detect some of the signal back. And it will trigger the digital on and off signal pin.
That is when a specific threshold distance has been detected.
Most boards will have 2 potentiometers. One potentiometer is to adjust how sensitive the sensor is.
You can use it to adjust the distance from the object at which the sensor detects it.
And the other potentiometer, which changes the transmitter IR frequency is not adjusted.
Specifications of KY-032:
- Working voltage: DC 3.3V-5V
- Working current: ? 20mA
- Operating temperature: -10 ? – 50 ?
- detection distancecscart_2-40cm
- IO Interface: 4-wire interfaces (- / / S / EN)
- Output signal: TTL level (low level there is an obstacle, no obstacle high)
- Adjustment: adjust multi-turn resistance
- Effective angle: 35 ?
- Size: 28mm ? 23mm
- Weight Size: 9g
Here we use the obstacle avoidance module and a digital interface. Built-in 13 LED build a simple circuit, making avoidance warning lamp.
The obstacle avoidance Sensor Access Digital 3 interface.
And it is when the obstacle avoidance sensor senses a signal, LED light, and vice versa off.
Example code
Int Led = 13 ;// define LED Interface
int buttonpin = 3; // define the obstacle avoidance sensor interface
int val ;// define numeric variables val
void setup ()
{
pinMode (Led, OUTPUT) ;// define LED as output interface
pinMode (buttonpin, INPUT) ;// define the obstacle avoidance sensor output interface
}
void loop ()
{
val = digitalRead (buttonpin) ;// digital interface will be assigned a value of 3 to read val
if (val == HIGH) // When the obstacle avoidance sensor detects a signal, LED flashes
{
digitalWrite (Led, HIGH);
}
else
{
digitalWrite (Led, LOW);
}
}
Package includes:
1x KY-032 Obstacle Avoidance Sensor Module
This Avoidance Sensor returns a signal when it detects an object in range.
That is when a specific threshold distance has been detected. And it is when the obstacle avoidance sensor senses a signal,
LED light, and vice versa off. When the fingerprint is registered, entry twice for each fingerprint, and processed the image,
a composite template is stored in the module. Fingerprint matching, through the fingerprint sensor,
entry the fingerprint image and processing, and then matching comparison with the module fingerprint template
(if it is matched a template specified in the module, known as fingerprint matching, that is 1: 1 mode.








Reviews
There are no reviews yet.